Negli ultimi anni, si è riscontrata una crescente diffusione dei robot per il prelievo di articoli, sia in forma di strati completi che di singoli pezzi o articoli di forma anche non regolare.
Tipicamente, viene allestita un’area dedicata al prelievo separata dalla zona di stoccaggio, che comprende una o più stazioni di prelievo.
Ogni modulo è caratterizzato dalla presenza di un robot dotato di un dispositivo di presa progettato per manipolare strati o singoli oggetti.
Tre tipologie di robot: antropomorfi, cartesiani, umanoidi
In base al tipo di movimento che il dispositivo è in grado di eseguire, si distinguono tre principali tipologie di robot : si definiscono “antropomorfi” i robot il cui sistema di movimentazione emula i gesti realizzabili da un arto umano e che solitamente presentano da 4 a 6 assi rotazionali, permettendo loro di raggiungere la maggior parte dei punti nello spazio circostante.

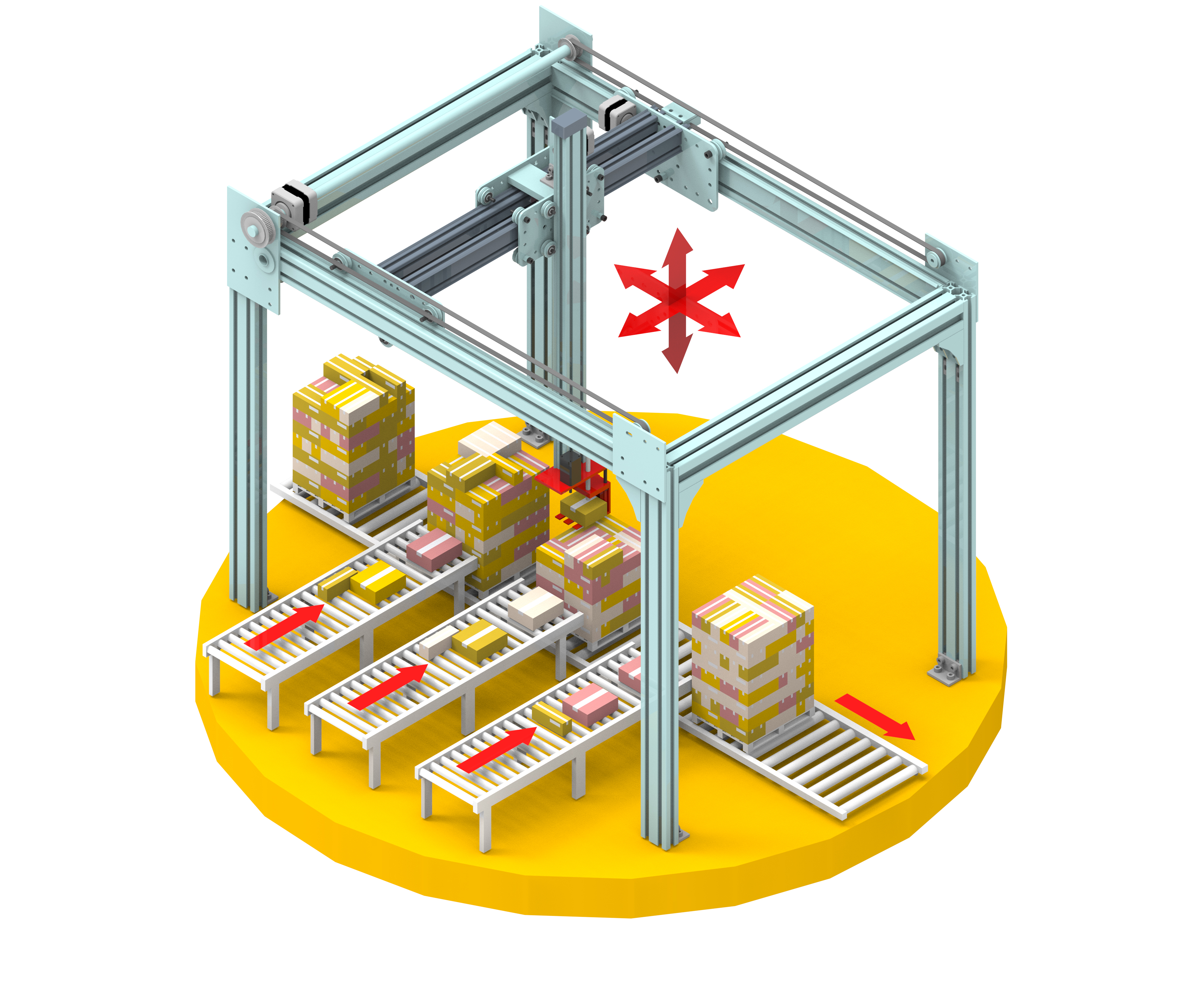
I “robot cartesiani” sono invece dotati di un sistema di movimentazione a carroponte che si sposta lungo due binari aerei e un dispositivo di prensione, consentendo movimenti lungo gli assi coordinati x, y e z.
Recentemente, sono stati presentati dei robot denominati “umanoidi”, che si distinguono per le loro articolazioni mobili, simili a quelle degli esseri umani, sia negli arti inferiori che in quelli superiori e sono in grado di imparare a riconoscere e manipolare diversi tipi di oggetti.
Tuttavia, va notato che si tratta ancora di prototipi, il che solleva interrogativi riguardo alla loro affidabilità e alla produttività di tali soluzioni. Rispetto alla produttività occorre segnalare che l’organo di presa preleva 1 pezzo/volta rispetto alla presa di un operatore che è multipla.